
[ESP32] WebSerial / WebUSB – another Rabbit Hole
In my recent post about accessing the bootloader via WebSerial, I only covered the common desktop and Chrome setups. While that covers my main use case, I still wanted to go a step further and use my mobile phone to flash an ESP32 via a...
[ESP32] Browser-based firmware image viewer and editor
While writing the title of that post, a cold shower ran down my back. Hell, what have I been doing lately? With a generous amount of GitHub Copilot credits, I’ve been sliding deeper into vibe coding. Or assisted coding. However you want to call it....
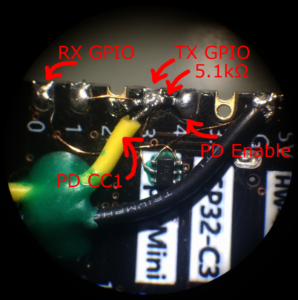
[ESP32-PD] USB PD using ESP32 / Zigbee Crib
Backstory So it was the end of the year again and everything got decorated for christmas. This time I got an extra job to “make the illumination of the crib properly”. Great, I had some cool COB LED strips waiting for a proper use case,...